
Solving Problems by Searching
Problem-solving agent
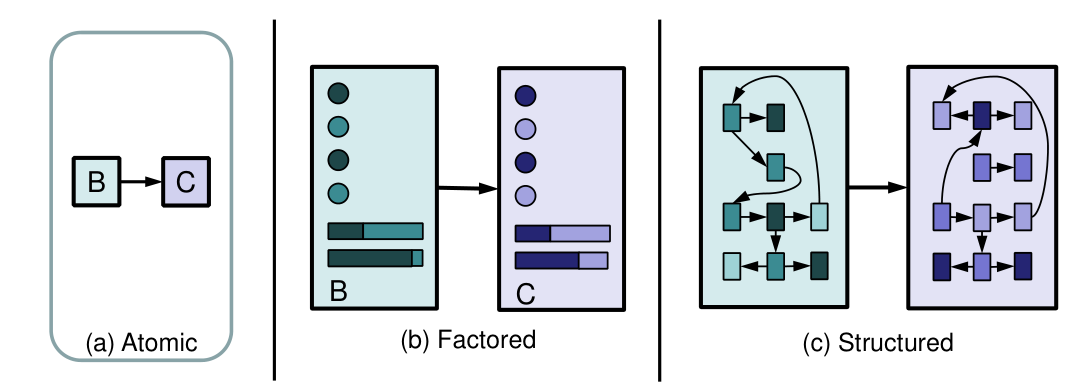
问题求解智能体使用“原子”进行表征,表示一个状态
Search problems in real world
比如说地图导航、扫地机器人的路径规划
Toy Problem

早期的人工智能就是来解决这些小问题的。
Problem formulation
这些问题有一些共同点:
- 有一个初始情况和比较确定的目标
- 有不同的简单行为(比如8-puzzle中每个数字可以上下左右移动),执行特定行为的序列可能能够达到目标
- 搜索就是找到能够达到目标的序列
- 这些行为序列可能需要一定的代价(cost)
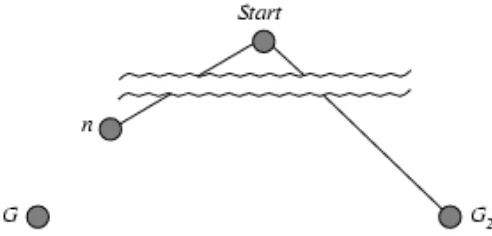
当有一系列状态时,就可以形成一个状态空间(state space),然后我们需要在状态空间中做搜索。比如我们想要从一个城市到另一个城市,地图如图
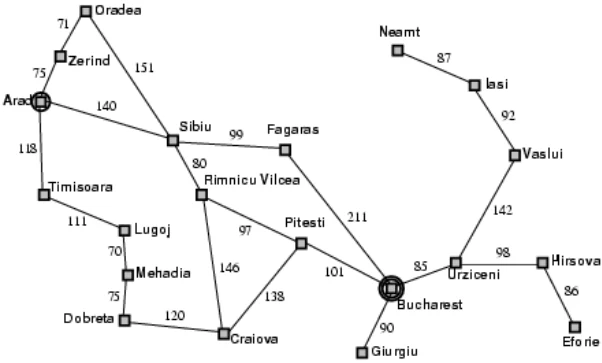
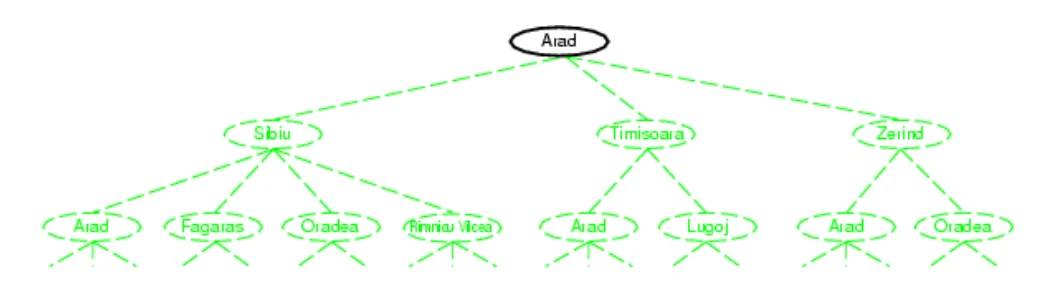
需要找到一条路径,就可以画出一个搜索树,其中初始状态就是树的根,树上的每一个节点表示一个状态,能够代表走过的路径。
这个问题形式化的说:
- 有一个初始状态,就是树的根
- 有一系列行动,或者说后继函数,对应于树上每个节点的子节点
- 目标测试,即看有没有到达目的地
- 路径代价,即从一个城市到另一个的距离。我们可以
- 一个解决方案就是一个行动的序列,能够从初始状态到达目标状态
- 搜索策略:就是从树上的某个节点如何选择到达下一个节点。搜索策略可以分为无信息搜索和启发式搜索
- 无信息搜索(Uninformed search)表示没有与问题相关的信息,仅仅是根据制定的规则进行搜索
- 启发式搜索(Heuristic search)指有与问题相关的信息,会综合考虑信息进行搜索
Search strategies
搜索策略需要考虑以下几个方面:
- 完备性(completeness):当问题有解时,能够找到问题的解
- 时间复杂度(time complexity):算法在最坏情况下需要的时间
- 空间复杂度(space complexity):算法需要的内存空间
- 最优性(optimality):能否找到代价最小的解?
Uniformed search strategies
无信息搜索主要包括:广度优先搜索(Breadth-first search),深度优先搜索(Depth-first search),深度受限搜索(Depth-limited search),迭代加深搜索(Iterative deepending search),一致代价搜索(Uniformed-cost search)。
Breadth-first search
广度优先搜索的性质
- 是完备的(只要深度 是有限的)
- 时间复杂度 ,式子中的最后一项表示的是先扩展节点(将子节点放到队列中),然后再做目标测试,在最坏情况下有 个节点都要做扩展
- 空间复杂度 ,因为需要把每个节点都存在内存中。这里同样是先做拓展
- 能够满足最优性,因为是从浅到深搜索的,同时每步cost=1
深度优先搜索的优缺点
- 优点:能够找到到目标的最短路径
- 缺点:对空间的需求很高
- 改进为一致代价搜索(Dijkstra算法)
Uniform-cost search
拓展代价最低的路径,边缘(fringe)为按照代价排序的优先队列
- 如果每一步的代价都是正数 cost ,那么是完备的
- 时间复杂度 ,其中 为最优解的代价
- 空间复杂度
- 满足最优
Depth-first search
- 如果深度是有限的,那么是完备的;否则不完备
- 时间复杂度 ,其中 为树的最大深度,上面的 是解所在的深度。如果 的话,这个时间复杂度是很差的。
- 空间复杂度 ,线性空间
- 不满足最优(最优解可能在其他分支上)
Depth-limited search + Iterative deepening search
限制搜索的深度,防止深度优先搜索中搜索过深的问题,但是这可能会导致找不到解(解可能在更深的地方)。因此接着引入迭代加深搜索。即使用深度限制搜索,但是会不断加深深度,知道最后找到解。
这个算法虽然看起来很naive,但是时间复杂度并不会增加太多。假如解的深度依然为 ,那么
- 时间复杂度为
- 空间复杂度
- 能够达到最优解(前提是step cost=1,和BFS一样)
相当于结合了深度和广度优先搜索的优势
Heuristic search
启发式搜索像一个优化问题,每一步的操作都希望减小代价的预期值,同时最终的解是要求找到全局代价最小的解。
Greedy best-first search
对每个节点使用评估函数(evaluation function) ,用于评估总的代价,然后在执行下一步的时候选择评估代价最小的操作。
贪心最佳优先搜索中, , 为启发式函数(heuristic function),用于估计某个节点到目标节点的代价。比如说从地图上一个城市到另一个城市寻找最短路径的问题,启发式函数 就可以使用某个城市到终点的直线距离,虽然实际要走的路程并不等于直线距离,但是可以用这个来做一个估计。
A* search
贪心最佳优先只估计某个节点到终点的距离,这是不太合理的,因此A*搜索还考虑了从起点到某个节点的距离,即 ,其中 是从起点走到节点 已经付出的最小代价(不是估计)。
Admissible heuristics
一个可接受的启发式函数(Admissible heuristics)需要满足:对于所有的节点 ,要有 ,其中 表示从节点 到终点的真实代价。
称为低估,反之成为高估。A*搜索想要生效,那么启发式函数就应该低估而不能高估,也就是说启发式函数一定要是可接受的。
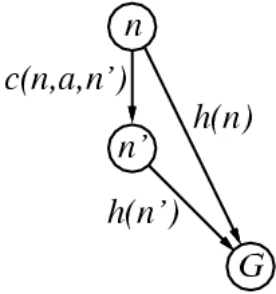
Consistent heuristic
满足一致性的启发式函数需要满足 ,其中 为从 到 的真实代价
对于通常的例子,满足可接受性的启发式函数也会满足一致性。
Optimality of A*
如果 是可接受的,那么A* 在树搜索中一定能找到最优解;如果 是一致的,那么A* 在图搜索中能找到最优解。
第一条结论不难证明,因为 总是低估的。
假设 是一个最优解, 是一个次优解,并且此时 和 都在边缘队列(fringe)中,其中 是从起点到 的路径中的一个节点。
因为 是最优的,那么 ,同时 ,因此 会一直呆在边缘队列中而不会被选中。最终被选中的只能是 。
Properties of A*
- 是完备的(只要 的节点是有限的)
- 时间复杂度为指数
- 空间复杂度:需要将所有节点都放在内存中
- 找到的解是最优的
Heuristic function
给出一个启发式函数的设计实例。对于8-puzzle问题
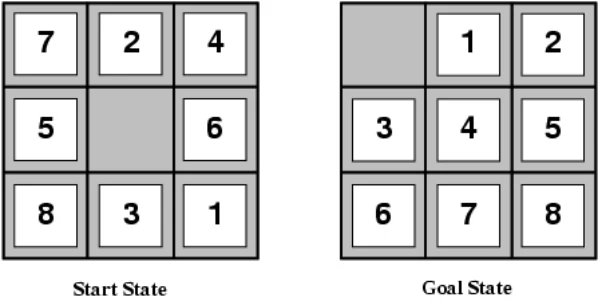
我们可以选择没有放到目标位置上的数字个数作为启发式函数,那么此时 ;也可以把曼哈顿距离之和作为启发式函数,那么此时 。不难看出这两种启发式函数都是低估的,因此都是可接受的。
而对于这两种启发式函数,使用曼哈顿距离的方法结果更好,因为这种启发式函数的估计值离真实情况更近,搜索错误的空间更小,能够更快地得到最优结果。
Beyond Classical Search
Local search algorithms
局部搜索,不关系路径,只关心目标;从某个状态开始,通过不断地改进,从而到达理想的状态。比如说8皇后问题,只关心能不能到达8皇后互不冲突的目标,而不关心是通过什么方式达到这个目标;这个问题使用局部搜索的话也可以一次次的移动来改进结果。
因此局部搜索有两个主要优势
- 占用内存较小(因为不像A*搜索那样需要记住中间的情况)
- 在极大甚至无穷的空间中能够找到一个比较好的结果
Hill-climbing search
“就像一个有失忆症的人在大雾中爬珠穆朗玛峰”。不记录之前状态,只能看到附近的情况,因此容易陷入局部最优解。
Simulated annealing
模拟退火,并不一定是每一步都向更优的结果走,而是有一定概率会选择比较差的结果。
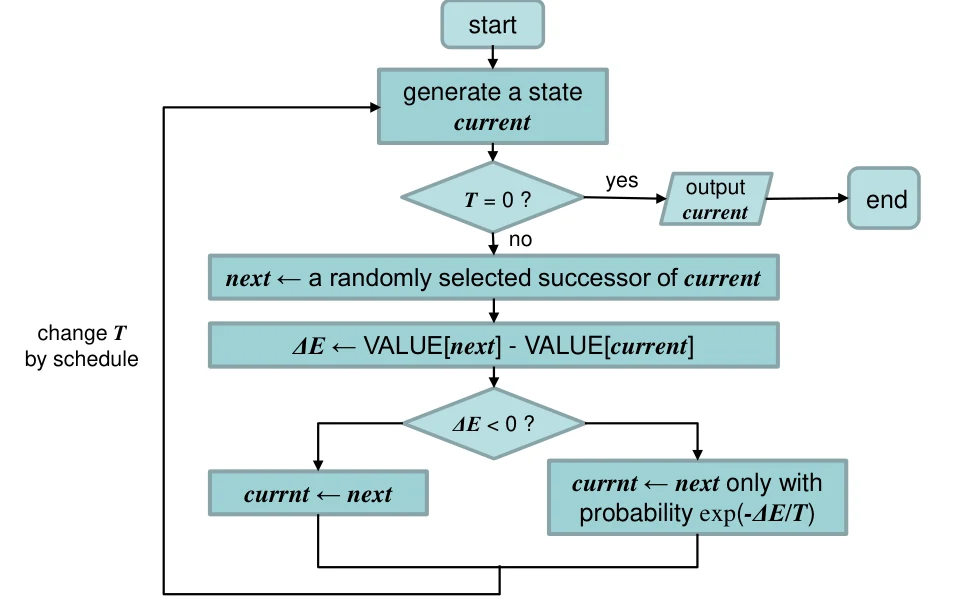
模拟退火算法的一些问题
- 代价函数(cost funtion)需要设计的比较好,因为这个函数需要被计算上百万次
- 可能和问题相关,并不一定能找到最优解
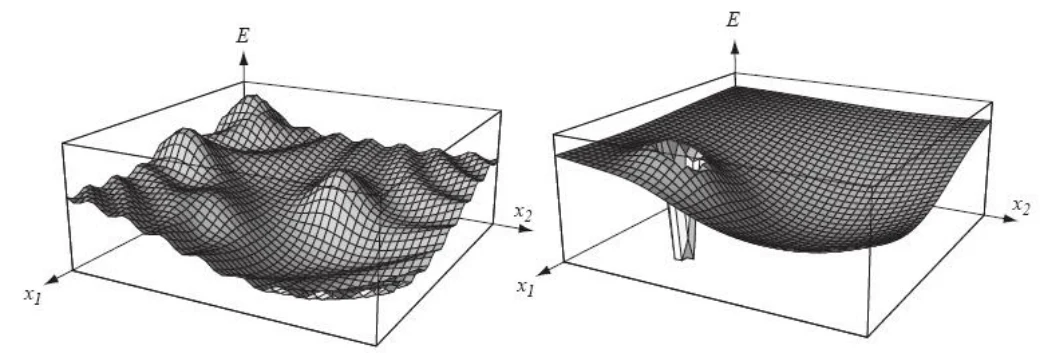
- 需要能量函数比较平滑,否则效果也不好。比如模拟退火比较适用于左边的图,而不适用于右边的图

Local beam search
同时做 次搜索
Genetic algorithms
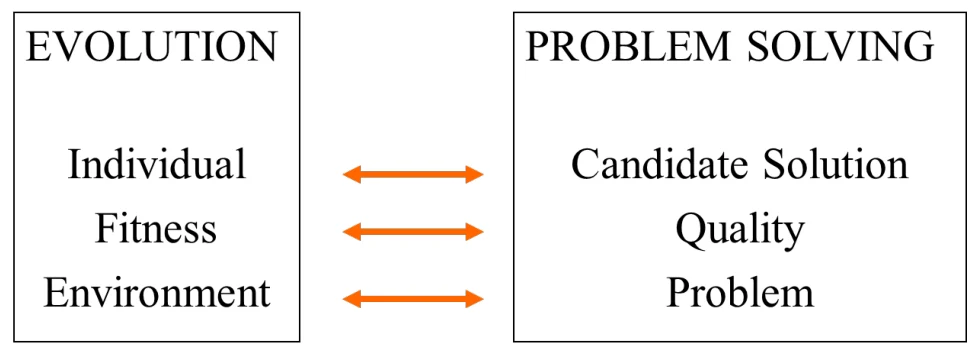
遗传算法,模拟自然选择。遗传算法不一定能找到最优解,也不一定能收敛,但是可以限定遗传的代数来终止迭代。
遗传算法的术语:
- 个体(individual):任意一个候选解
- 种群(population):所有的个体
- 适应度(fitness):正在优化的目标函数
- 特性(trait):个体的特征
- 基因组(genome):个体所有的染色体,即特征的集合
遗传算法的进行即问题的求解
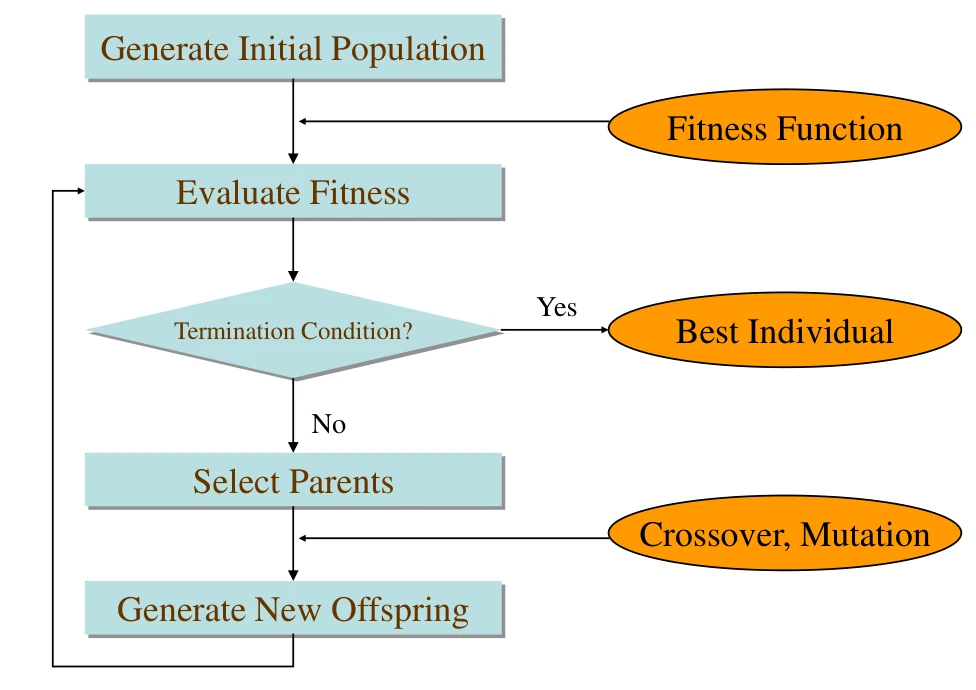
遗传算法的基本流程
Example: the MAXONE problem
即需要最大化字符串中1的数量
首先进行随机初始化
s1 = 1111010101 f (s1) = 7
s2 = 0111000101 f (s2) = 5
s3 = 1110110101 f (s3) = 7
s4 = 0100010011 f (s4) = 4
s5 = 1110111101 f (s5) = 8
s6 = 0100110000 f (s6) = 3
开始选择能够进行交叉遗传的个体:使用轮盘赌算法,根据适应度来决定被选中的概率,一个个体可能被选中多次。
s1’ = 1111010101 (s1)
s2’ = 1110110101 (s3)
s3’ = 1110111101 (s5)
s4’ = 0111000101 (s2)
s5’ = 0100010011 (s4)
s6’ = 1110111101 (s5)
然后将选中的个体两两配对,进行交叉重组。交叉有一定概率,比如说 。交叉就是相互之间交换一小段染色体片段
Before crossover:
s1’ = 1111010101 s2’ = 1110110101
After crossover:
s1’’ = 1110110101 s2’’ = 1111010101
最后以一定的概率进行变异,变异有助于种群跳出局部解,能够提高种群多样性。
Initial strings After mutating
s1’’ = 1110110101 s1’‘’ = 1110100101
s2’’ = 1111010101 s2’‘’ = 1111110100
s3’’ = 1110111101 s3’‘’ = 1110101111
s4’’ = 0111000101 s4’‘’ = 0111000101
s5’’ = 0100011101 s5’‘’ = 0100011101
s6’’ = 1110110011 s6’‘’ = 1110110001





